




Walk-Man 2, il robot per i soccorsi nasce all'Iit di Genova





L’Istituto italiano di tecnologia di Genova ha creato il nuovo Walk-Man 2, robot ultraleggero in grado di lavorare in situazioni di emergenza o troppo pericolose per l’uomo come case danneggiate dai terremoti o siti industriali altamente inquinati. Nasce dalla collaborazione con il Centro Ricerche E. Piaggio dell’Università di Pisa, l’École Polytechnique Fédérale di Losanna, il Karlsruhe Institute of Technology in Germania e l’Université catholique de Louvain in Belgio, nell’ambito di un progetto finanziato dalla Commissione Europea dal 2013 e in fase di conclusione. Il “debutto in società” è con il direttore scientifico di Iit Roberto Cingonali durante l’evento di presentazione della nuova edizione di Corriere Innovazione oggi 23 febbraio a Milano.

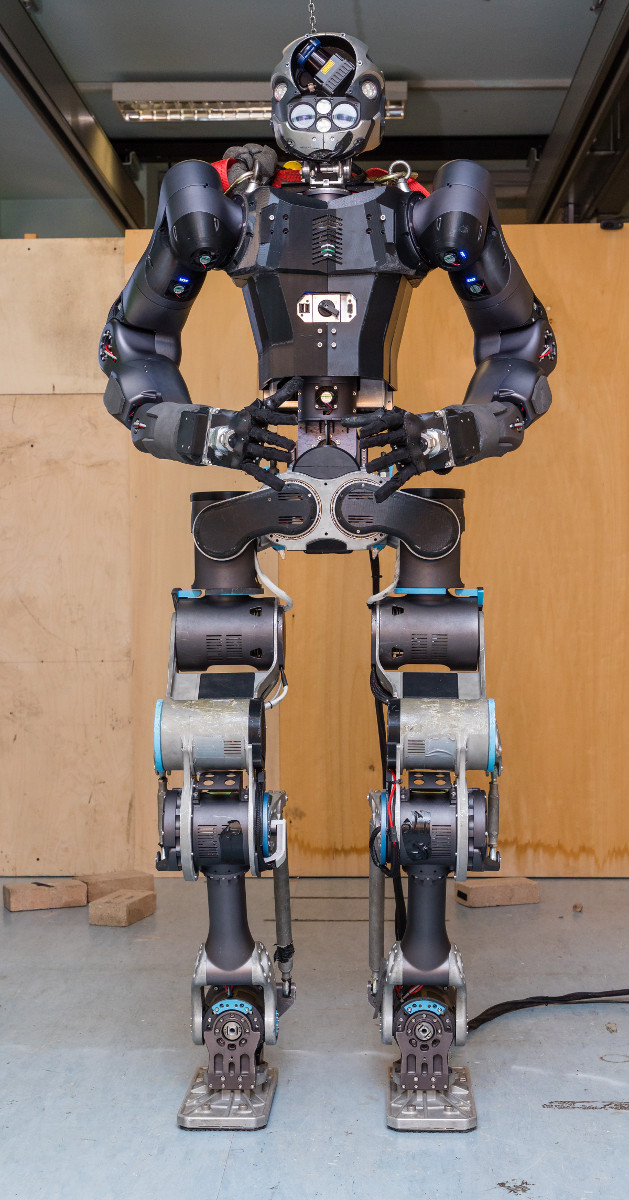
Walk-Man 2
Rispetto alla prima versione già testata ad Amatrice in una casa danneggiata dal terremoto dell’agosto 2016, il nuovo Walk-Man ha il busto e le braccia più leggeri e pesa 31 chilogrammi in meno: è dimagrito da 133 a 102 chili. Per realizzare questa innovazione ci sono voluti 6 mesi di lavoro da parte di una squadra di circa 10 ricercatori coordinata da Nikolaos Tsagarakis, ricercatore all’Iit e coordinatore del progetto. In questo modo può consumare meno energia, operando per circa due ore con una batteria da 1 kWh. Una miglioria che, secondo il direttore dell’Iit, potrebbe portare a importanti applicazioni in altri settori che richiedono un mix di durata e abilità, come la chirurgia di precisione.
Nella sua ultima prova il robot ha affrontato uno scenario definito dai ricercatori insieme alla Protezione Civile di Firenze: un impianto industriale danneggiato da un terremoto in cui sono presenti detriti, fughe di gas e fuoco, quindi una situazione pericolosa per l’uomo. Lo scenario è stato ricreato in laboratorio attraverso la costruzione di un ambiente fittizio, dove Walk-Man è stato in grado di muoversi ed eseguire quattro compiti specifici: aprire e attraversare una porta per entrare nella zona; localizzare una valvola di tipo industriale e chiuderla, così da simulare l’interruzione della perdita di gas; rimuovere gli ostacoli sul suo percorso; e infine identificare la posizione delle fiamme e attivare l’estintore.
Il robot è stato controllato a distanza da un operatore umano tramite un’interfaccia virtuale e una tuta sensorizzata, vestita dall’operatore, che consente di azionare il robot in modo naturale, controllandone la manipolazione e la locomozione, come un avatar. L’operatore riceve in modo continuo immagini e informazioni dai sistemi di percezione del robot. L’umanoide è alto 1,85 metri ed è composto di diversi materiali, soprattutto metalli leggeri: ergal (60%), leghe di magnesio (25%) e titanio, ferro e plastica.

